Improve Inventory-Aware Pathfinding with Map Preprocessing
This article has been originally published on Gamasutra.
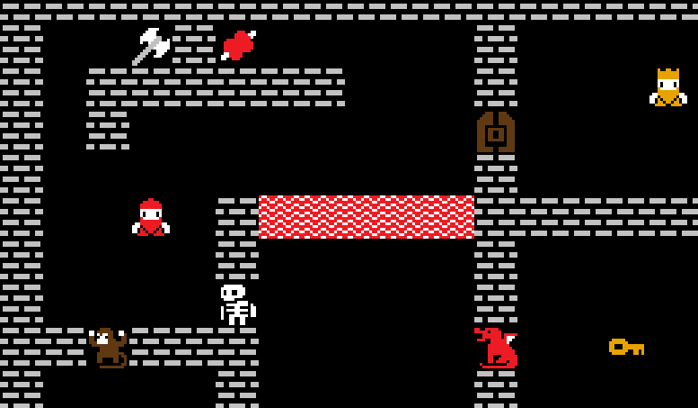
In the last article we introduced a basic approach for Inventory-Aware Pathfinding (IAP), a pathfinding algorithm capable of interacting with obstacles and not just avoiding them. If you have not read it, I encourage you to go back and read it to understand the basic challenges and the main ideas behind the proposed solution.
For instance, we can have a pathfinding algorithm that can solve small plans and “puzzles” involving reasoning like “before passing this door, I need to get that key”. This is definitely planning territory. However, if we focus on a small subset of the problem, we may squeeze the algorithm into the pathfinding search itself.